来自外星的异形?哈佛展示目前最怪异的仿生机器人之一——海胆机器人
时间:2019-11-08 13:42:10 热度:37.1℃ 作者:网络

导读
最近在澳门召开的2019届IROS(International Conference on Intelligent Robots and Systems) 机器人大会上,来自哈佛大学的研究者的展示了一种新型的仿生机器人UrchinBot,形似”海胆”,没错,就是你我餐桌上吃的海胆。这款机器人基于气动或者液压驱动的软体机器人技术,当你看到它的外形,你会以为这是一只来自于外形的异形生物,它绝对是目前来说最怪异的仿生机器人之一了,那么它是怎么设计的,以及它到底有什么用呢?小编今天为您解读!
作者:Riddick
编辑:Alley
海胆机器人
适者生存,亿万年生物的进化分支出了各种不同的生物,海陆空,生物可以适应各种不同的环境。机器人学家们在研发新的机器人时,尤其喜欢从大自然的奇妙生物中寻找灵感:从大家耳熟能详的仿生机械狗,到仿生鱼,甚至仿生蜘蛛,仿生蝙蝠,仿生水母,仿生虫…等等,形态各异的仿生机器人让原本呆板固定的机器人变化出了各种形状。
今天小编向大家介绍一款绝对是目前来说最为怪异的仿生机器人,仿生海胆机器人,当你看到它的外形,说它是来自外星的异形一点也不为过!(机器人的视频在文末)
当然这些机器人的设计并不仅仅是为了博人眼球,他们对于特定的场景有着特别的适应能力,才是研发这些机器人的根本原因。研究者指出,它在水下清洁和检查方面有很高的潜在应用价值。

几种典型的仿生机器人

海胆机器人的管足运动
海胆机器人的旋转运动
海胆机器人的水下运动
海胆机器人的设计
海胆的外形和身体构造失分奇特。它们巧妙的结合了硬体和软体,海胆的外壳覆盖着坚硬的棘刺,以及柔软的管足,棘刺负责支撑身体,管足负责牵引身体移动。海胆在海底的运动充分运用了这些“触手们”,尽管海胆的运动极其缓慢,但它们可以附着潜伏在海底岩石的角落和缝隙中。

海胆的生物结构

海胆的棘刺和管足
研究者称他们的“海胆”机器人为UrchinBot,它的身体有五个软体管足(绿色)和十个刚性的可动棘刺(白色)。这些“触手”由机器人体内的软驱动器驱动,可以让机器人沿着特定方向前进或者旋转。
由于成年海胆的结构(如之前的海胆图)过于复杂,研究者们模仿幼年海胆(下图左图),幼年海胆有着相对简单的结构,但是它们只有0.5毫米大小,所以研究者们把机器人做成了放大版的幼年海胆。

海胆机器人的仿生机理
下面这幅图展示了机器人的身体结构设计。躯体的直径尺寸大约230mm。UrchinBot的躯壳内包含泵,阀门和控制器等,从而使其可以完全不受束缚地在陆地和水下运行。
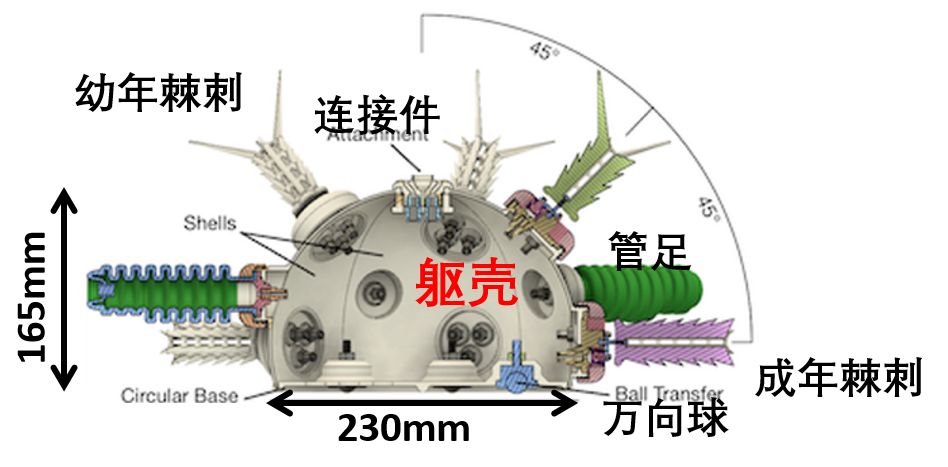
海胆机器人的结构设计
真正的海胆的管足会分泌粘性物质把海胆沾到物体表面,在脱离时在分泌出分解酶分解粘液。UrchinBot在管足的脚趾处安装磁铁,只要机器人在铁质表面上移动,它就可以发挥类似的作用。当管脚膨胀时,它向下弯曲,并在足够的压力下,脚趾磁体弹出并粘附在表面。然后UrchinBot抽气/液将管脚吸回,机器人就会沿着收缩的方向运动。

管足的结构设计
至于棘刺的设计,每个棘刺都通过球形接头连接到身体,围绕接头有三个气动弹性圆顶,推动圆顶可以让棘刺沿不同方向旋转。只要棘刺按照规律运动,UrchinBot就可以朝着一定方向旋转。

棘刺的结构设计
机器人的表现
通过实验证明,UrchinBot的棘刺的运动范围与实际的海胆相似。它的管足可以达到6:1的延伸比例,这与幼年海胆的延伸比例10:1相当接近,但比成年海胆要小得多,成年海胆可以将其管脚延伸至50倍的长度。 UrchinBot的速度不如真实海胆快,它的最高速度为6毫米/秒,即每秒0.027体长,比幼年海胆(每秒可前进10倍体长)要慢很多,但它的速度仅为成年海胆的一半。

海胆机器人的表现
应用前景与展望
UrchinBot可能不属于能够快速运动的水下机器人,但研究者说,它在水下清洁和检查方面有很高的潜在应用价值,特别是在污垢严重的情况下,海胆机器人有更好的适应性。UrchinBot未来的研究方向是为它装满尽可能多的触手,从而进一步提升它的灵活性。尽管UrchinBot近期还没有合适的应用场景,但它暂时可以作为水下测试平台来帮助研究人员确定可能对人体造成伤害的物理化学危险。
文末的视频:
海胆机器人
文章信息:
“Design, Fabrication, and Characterization of an UntetheredAmphibious Sea Urchin-Inspired Robot,” by Thibaut Paschal, Michael A. Bell,Jakob Sperry, Satchel Sieniewicz, Robert J. Wood, and James C. Weaver fromHarvard’s Wyss Institute, was presented this week at IROS 2019 in Macau.

