JNER:一种超轻量级、多功能、无束缚的机器人踝关节外骨骼在脑瘫患者中的可用性和性能验证
时间:2021-11-11 17:02:39 热度:37.1℃ 作者:网络
踝关节外骨骼有可能增强未受伤个体和神经疾病个体的行走能力。踝关节是动力辅助的一个常见目标,因为它在有效的两足运动中起着关键作用,并且是神经功能缺损个体中常见的受影响关节。例如,患有脑瘫(CP)的个体通常有踝关节-足底屈肌无力。外骨骼是一种有效的康复手段。已经有文献证明,在站立阶段,双边协助与使用者的生物踝关节力矩成比例在水平行走过程中,可以改善CP小群体的能量消耗和行走速度等关键指标。然而,早期原型的可靠性和耐用性较差,并且证明对于体重大于45 kg的个体无效,因为扭矩产生有限,脚踝组件相对于小腿和脚的运动显著。但,CP患者在没有研究人员或技术人员干预的情况下佩戴和操作踝关节外骨骼的能力仍然未知。
本研究的第一个目标是设计一种新型踝关节外骨骼,并评估行走期间的运动性能。第二个目标是通过降低健康成年人快速倾斜行走的能量消耗,突出该装置的相关性和多功能性这些中等强度到高强度的活动进行这些人体性能实验,本文假设两组人在使用vs行走时都会有显著的改善。最终目标是完成可用性评估,量化用户或其看护人在没有研究人员干预的情况下使用和安装设备的时间。本文发表在《神经病学,神经外科学和精神病学杂志》上(Journal of Neurology, Neurosurgery & Psychiatry)。
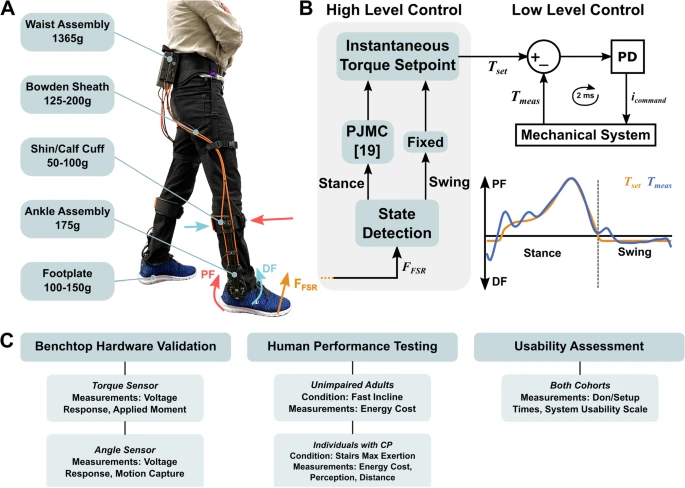
设计了一个重量轻的双向电池供电的脚踝外骨骼。腰部安装的电机通过链条到电缆传输系统驱动脚踝处的滑轮组件。装有仪表的踝关节滑轮安装在碳纤维管内,碳纤维管也支持外壳反作用力。碳纤维脚板和小腿袖口提供了坚固而舒适的负荷转移界面。踏板上的传感器通知了一个高级控制器,该控制器用于在站立阶段提供自适应的跖侧屈肌扭矩和/或在摆动阶段提供恒定的背侧屈肌扭矩。脚踝处的定制嵌入式扭矩传感器为低水平闭环扭矩控制提供反馈。外骨骼的峰值扭矩输出为30 Nm。外骨骼总重量的50%至65%(取决于配置)包含在腰部组件内,因此,将远端增加的重量对代谢能力的损害降至最低。
假肢组成系统
踝关节组件的设计目的是最大限度地减少远端重量和小腿的侧向突出,支持反作用力,并提供刚性界面,在活动期间支持和协助使用者。身体远端增加的重量增加了行走的代谢成本,比近端增加的更多,并限制了外骨骼的受益。放置在下肢内侧的部件会增加肢体碰撞的风险,而后部或外侧突出可能会导致与环境碰撞。踝关节组件包括一个单自由度旋转关节,并通过小腿或小腿袖口和脚板与使用者连接。设计了一个定制的嵌入式角度传感单元,位于碳纤维管内皮带轮上方,为开发新的角度或速度相关控制策略、患者监测踝关节角度或运动范围以及测量设备的机械功率提供了一个平台。一个角度传感器位于皮带轮旋转轴上方,位于碳纤维管内,以尽量减少组件的横向突出。FSR信号用于检测站姿和摆动之间的转换,并确定站姿期间的辅助扭矩曲线。
招募了六名健康成年人,目的是证明设备适用于无损伤的中等强度步行性能增强。招募了七名CP患者,他们的年龄和损伤程度各不相同,目的是证明设备能够有效地提高该患者群体在最大用力测试期间的有氧能力。在本文之前的研究中,重点是在CP患者的水平地面上增加步行,试图探索踝关节外骨骼辅助的应用,以提高最大的运动能力。
六名未受伤的参与者中有五名在跑步机倾斜行走时对外骨骼辅助反应良好。在试验的最后3分钟内,能量消耗的改善率从7.4%到18%不等,其中一名参与者(P5)在辅助行走时没有变化。队列在使用与不使用该装置的情况下行走时,代谢能力有9.9±2.6%(平均值±标准误差)的改善(p=0.012,d=0.59)。六名未受伤的参与者中有五名获得了外骨骼扭矩、角速度和机械功率。参与者都能够安全地完成最大用力爬楼梯测试,无任何意外。在外骨骼辅助下进行最大用力实验期间,爬过的楼层数增加了38.4±23.6%(p=0.013,d=0.25)。尽管步行距离增加,但辅助和非辅助最大用力测试的净代谢功率没有显著差异(p=0.49)。总的安装时间和应用程序安装时间通常随着使用次数增多而不断减少。

在5度斜坡(左列)和楼梯踏步机(右列)上进行辅助行走期间,从单个受试者(P1)测量的代表性外骨骼(蓝色)和规定的(红色)扭矩、速度和功率曲线(平均值±标准差)。
本文的设备是所有研究或商用动力设备中最轻的踝关节组件之一。证明了患有CP的儿童和年轻成人在最大用力测试中使用该设备时,能够在楼梯踏步机上多爬近40%的台阶。这为可穿戴式踝关节辅助装置在高强度运动中提供心理和生理益处的潜力提供了新的见解活动。轻量的无约束踝关节辅助可能允许CP患者增加以任务为导向的训练,已被证明在改善脑瘫和卒中后患者的活动能力方面是成功的。本文是第一项关于无约束外骨骼设计的研究报告,该外骨骼允许身体残疾的个人在没有研究人员干预的情况下戴上和操作设备。患有脑瘫的个人能够戴上和控制设备,直到有人协助行走(他们自己或有护理人员帮助)平均只需4分钟,这表明未来在临床和家庭环境中的部署可能是现实的。
总之,电池供电的踝关节外骨骼对于受试者来说很容易使用,初步证据表明,对于未受伤的成年人、患有CP的儿童和成年人,在不同的康复条件下是有效的。
Orekhov, G., Fang, Y., Cuddeback, C.F. et al. Usability and performance validation of an ultra-lightweight and versatile untethered robotic ankle exoskeleton. J NeuroEngineering Rehabil 18, 163 (2021). https://doi.org/10.1186/s12984-021-00954-9

